MPU-6050 Project Breakdown
1:32
Project
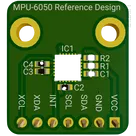
MPU-6050 Reference Design: Detailed Breakdown
1. Purpose & Applications
3. Functional Blocks & Interactions 3.1 Power & Decoupling
4. Design Choices & Trade-offs
5. Layout & Performance Considerations
6. Real-World Challenges
7. Areas for Improvement & Future Enhancements
This project is a breakout/reference design for the InvenSense MPU-6050 6-axis IMU, providing a ready-to-use I²C interface, power decoupling, and header pins for easy integration into host systems.
1. Purpose & Applications
- Enable rapid evaluation and integration of the MPU-6050 (3-axis accel + 3-axis gyro) into embedded designs
- Typical use cases: drones, robotics, motion tracking, stabilization, gesture recognition
- Offers both primary I²C bus (SDA/SCL) and auxiliary I²C bus (XDA/XCL) for external magnetometer or sensors
2. Core Components & Netlist
| Designator | Part | Function |
|---|---|---|
| IC1 | MPU-6050 | 6-axis motion sensor with on-chip regulator |
| C2 | Decoupling cap on VDD | ± capacitive filtering on analog supply |
| C4 | Decoupling cap on VLOGIC | Stabilizes digital I/O rail |
| C3 | Cap on REGOUT | Required by MPU-6050 internal regulator |
| C1 | Cap on CPOUT | Bypass cap for internal charge pump output |
| R1 | I²C pull-up (SCL) | 4.7 kΩ typical pull-up to 3.3 V |
| R2 | I²C pull-up (SDA) | 4.7 kΩ typical pull-up to 3.3 V |
| J1 | 1×07 2.54 mm header | Breakout: VDD, GND, SDA, SCL, INT, XDA, XCL |
3. Functional Blocks & Interactions 3.1 Power & Decoupling
- 3.3 V In → nets
3V3/3.3Vfeed both VDD and VLOGIC pins on [IC1] - C2 on VDD and C4 on VLOGIC placed as close as possible to the pins
- Internal LDO: MPU-6050’s on-chip regulator requires C3 (REGOUT→GND) and C1 (CPOUT→GND) per datasheet
- Primary bus: SDA and SCL lines pulled up to 3.3 V by R2 and R1
- Net routing:
- SDA net → [IC1:SDA] → [R2] → [J1:Pin 3]
- SCL net → [IC1:SCL] → [R1] → [J1:Pin 4]
- Supports up to 400 kHz (or higher “Fast-mode Plus”) if layout and pull-ups are optimized
- Aux bus: XDA/XCL pins broken out to [J1:Pin 7]/[J1:Pin 5] for connecting an external magnetometer or other slave
- INT (interrupt) pin on [IC1] → [J1:Pin 5] for host to detect data-ready or motion events
4. Design Choices & Trade-offs
- Internal vs. external regulator
- Pros: fewer external parts, smaller BOM
- Cons: limited filtering control—must follow datasheet CPOUT/REGOUT requirements
- Pull-up resistor value (~4.7 kΩ) balances rise-time vs. I²C drive strength
- 0603 passives for compactness vs. ease of soldering
- 2.54 mm header → universal compatibility vs. larger board footprint
5. Layout & Performance Considerations
- Place decoupling caps within 2 mm of the chip’s VDD/VLOGIC pins
- Separation of analog (accelerometer/gyro) ground from digital ground if noise becomes an issue—consider split-plane or star ground
- I²C bus routing: keep SDA/SCL traces parallel, avoid stubs, limit trace length to minimize ringing
- Optional filtering: ferrite beads or series resistors (22 Ω–33 Ω) on I/O lines for EMI suppression
6. Real-World Challenges
- Thermal drift affecting sensor accuracy—consider temperature compensation
- Mechanical vibration → use proper mounting, conformal coating if needed
- Power-supply noise → add Pi filters or LDO upstream if host rail is noisy
7. Areas for Improvement & Future Enhancements
- On-board magnetometer (e.g., AK8963) → full 9-axis IMU
- Level-shifting circuitry for 5 V hosts
- SPI interface footprint for applications requiring higher-speed data transfer
- EMI/ESD protection: TVS diodes on I/O pins for robust field deployment
- Miniaturization: switch to 0201 passives, castellated edges, or castellated dome for module integration
In summary, this reference design adheres to the MPU-6050 datasheet recommendations, providing all necessary decoupling, pull-ups, and breakout access. Proper layout and component selection ensure stable operation up to Fast-mode I²C, enabling seamless integration into motion-sensing applications.
Add magnetometer
Add ESD protection
Decoupling placement
SPI interface footprint
282 days
Ready.
3V3
C1
Capacitance
2200p F
C3
Capacitance
0.1u F
INT
C2
Capacitance
0.1u F
SCL
SCL
SDA
3V3
3V3
3V3
R2
Resistance
10K Ω
R1
Resistance
10K Ω
XCL
SDA
XDA
C4
Capacitance
0.01u F
IC1
Reviews

- Wirelessly connects nets on schematic. Used to organize schematics and separate functional blocks. To wirelessly connect net portals, give them same designator. #portaljharwinbarrozo43.0M
- Wirelessly connects power nets on schematic. Identical to the net portal, but with a power symbol. Used to organize schematics and separate functional blocks. To wirelessly connect power net portals, give them the same designator. #portal #powerjharwinbarrozo11.4M
- A generic fixed resistor for rapid developing circuit topology. Save precious design time by seamlessly add more information to this part (value, footprint, etc.) as it becomes available. Standard resistor values: 1.0Ω 10Ω 100Ω 1.0kΩ 10kΩ 100kΩ 1.0MΩ 1.1Ω 11Ω 110Ω 1.1kΩ 11kΩ 110kΩ 1.1MΩ 1.2Ω 12Ω 120Ω 1.2kΩ 12kΩ 120kΩ 1.2MΩ 1.3Ω 13Ω 130Ω 1.3kΩ 13kΩ 130kΩ 1.3MΩ 1.5Ω 15Ω 150Ω 1.5kΩ 15kΩ 150kΩ 1.5MΩ 1.6Ω 16Ω 160Ω 1.6kΩ 16kΩ 160kΩ 1.6MΩ 1.8Ω 18Ω 180Ω 1.8KΩ 18kΩ 180kΩ 1.8MΩ 2.0Ω 20Ω 200Ω 2.0kΩ 20kΩ 200kΩ 2.0MΩ 2.2Ω 22Ω 220Ω 2.2kΩ 22kΩ 220kΩ 2.2MΩ 2.4Ω 24Ω 240Ω 2.4kΩ 24kΩ 240kΩ 2.4MΩ 2.7Ω 27Ω 270Ω 2.7kΩ 27kΩ 270kΩ 2.7MΩ 3.0Ω 30Ω 300Ω 3.0KΩ 30KΩ 300KΩ 3.0MΩ 3.3Ω 33Ω 330Ω 3.3kΩ 33kΩ 330kΩ 3.3MΩ 3.6Ω 36Ω 360Ω 3.6kΩ 36kΩ 360kΩ 3.6MΩ 3.9Ω 39Ω 390Ω 3.9kΩ 39kΩ 390kΩ 3.9MΩ 4.3Ω 43Ω 430Ω 4.3kΩ 43KΩ 430KΩ 4.3MΩ 4.7Ω 47Ω 470Ω 4.7kΩ 47kΩ 470kΩ 4.7MΩ 5.1Ω 51Ω 510Ω 5.1kΩ 51kΩ 510kΩ 5.1MΩ 5.6Ω 56Ω 560Ω 5.6kΩ 56kΩ 560kΩ 5.6MΩ 6.2Ω 62Ω 620Ω 6.2kΩ 62KΩ 620KΩ 6.2MΩ 6.8Ω 68Ω 680Ω 6.8kΩ 68kΩ 680kΩ 6.8MΩ 7.5Ω 75Ω 750Ω 7.5kΩ 75kΩ 750kΩ 7.5MΩ 8.2Ω 82Ω 820Ω 8.2kΩ 82kΩ 820kΩ 8.2MΩ 9.1Ω 91Ω 910Ω 9.1kΩ 91kΩ 910kΩ 9.1MΩ #generics #CommonPartsLibraryjharwinbarrozo1.5M
- A generic fixed capacitor ideal for rapid circuit topology development. You can choose between polarized and non-polarized types, its symbol and the footprint will automatically adapt based on your selection. Supported options include standard SMD sizes for ceramic capacitors (e.g., 0402, 0603, 0805), SMD sizes for aluminum electrolytic capacitors, and through-hole footprints for polarized capacitors. Save precious design time by seamlessly add more information to this part (value, footprint, etc.) as it becomes available. Standard capacitor values: 1.0pF 10pF 100pF 1000pF 0.01uF 0.1uF 1.0uF 10uF 100uF 1000uF 10,000uF 1.1pF 11pF 110pF 1100pF 1.2pF 12pF 120pF 1200pF 1.3pF 13pF 130pF 1300pF 1.5pF 15pF 150pF 1500pF 0.015uF 0.15uF 1.5uF 15uF 150uF 1500uF 1.6pF 16pF 160pF 1600pF 1.8pF 18pF 180pF 1800pF 2.0pF 20pF 200pF 2000pF 2.2pF 22pF 20pF 2200pF 0.022uF 0.22uF 2.2uF 22uF 220uF 2200uF 2.4pF 24pF 240pF 2400pF 2.7pF 27pF 270pF 2700pF 3.0pF 30pF 300pF 3000pF 3.3pF 33pF 330pF 3300pF 0.033uF 0.33uF 3.3uF 33uF 330uF 3300uF 3.6pF 36pF 360pF 3600pF 3.9pF 39pF 390pF 3900pF 4.3pF 43pF 430pF 4300pF 4.7pF 47pF 470pF 4700pF 0.047uF 0.47uF 4.7uF 47uF 470uF 4700uF 5.1pF 51pF 510pF 5100pF 5.6pF 56pF 560pF 5600pF 6.2pF 62pF 620pF 6200pF 6.8pF 68pF 680pF 6800pF 0.068uF 0.68uF 6.8uF 68uF 680uF 6800uF 7.5pF 75pF 750pF 7500pF 8.2pF 82pF 820pF 8200pF 9.1pF 91pF 910pF 9100pF #generics #CommonPartsLibraryjharwinbarrozo1.5M
- A generic fixed inductor for rapid developing circuit topology. *You can now change the footprint and 3D model at the top level anytime you want. This is the power of #genericsjharwinbarrozo15.4k
- An electrical connector acting as reusable interface to a conductor and creating a point where external circuits can be connected.Terminal
- 47 kOhms ±5% 0.125W, 1/8W Chip Resistor 0805 (2012 Metric) Automotive AEC-Q200 Thick Film #forLedBlinkjharwinbarrozo1.2M
- 10uF Capacitor Aluminum Polymer 20% 16V SMD 5x5.3mm #forLedBlink #commonpartslibrary #capacitor #aluminumpolymer #radialcanjharwinbarrozo1.2M
- Yellow 595nm LED Indication - Discrete 1.7V 1206 (3216 Metric) #forLedBlinkjharwinbarrozo1.1M





Inspect
MPU-6050 Reference Design
Controls
Properties
Availability & Pricing
| Distributor | Qty 1 | |
|---|---|---|
| Digi-Key | $4.63–$7.16 | |
| LCSC | $5.87 | |
| Mouser | $8.21 | |
Assets
- MPU-6050 Reference Design.png
id=MPU-6050 Reference Design
Thumbnail

Welcome 👋
Flux helps you build PCBs faster with an AI teammate!
Create your account to collaborate, stay updated, fork your own version, and get instant answers from our AI agent.