Arduino Nano Project Setup
lets run this all using a usb c. I DO NOT WANT THE POWER RUNNING OFF THE NANO. i also want to be able to interface it incase of code issues, and also i need you to make sure there is lets say to buzzers, i want plenty of sound out of them i want it to function like a RPA system or something the beeps speed up as distance is shorter
Thought for 1 min 48 sec
Great — I’ll build a Nano carrier powered only from USB‑C, with HC‑SR04, I2C display, two loud buzzers (rate increases as distance decreases), and independent programming/debug.
Plan summary:
- USB‑C 5V input with CC pull‑downs, fuse, TVS, bulk/decoupling; feed a 5V rail and isolate the Nano’s 5V (ideal/Schottky diode to prevent backfeed).
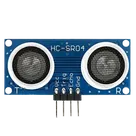
- Place Arduino Nano, HC‑SR04 header, and an I2C display header (default I2C 1602/2004 LCD). Add UART 1x6 and ICSP 2x3 for programming/debug independent of Nano USB power.
- Two loud 5V buzzers with NPN low‑side drivers and base resistors; clamp/flyback if magnetic. Map to Nano GPIO for cadence control.
- Wire TRIG/ECHO, SDA/SCL, buzzer drivers; label, add mounting holes, run DRC/ERC, prep for fab.
Before I start, quick confirmations (answer briefly):
- Nano variant: OK to target classic 5V Arduino Nano?
- Display: prefer I2C 16x2/20x4 LCD (simple, very readable) or SSD1306 I2C OLED (compact, high contrast)?
- Buzzers: use two 5V active buzzers for loudness/cadence, or passive transducers driven with PWM for tone control? (Active is simpler and loud.)
When you confirm, click Start on the plan bar and I’ll execute.
Choose Nano and display
Clarify buzzer type and loudness
Describe beeping behavior
Ask about power isolation details
Set distance ranges for tones