Project Overview and Optimization
3:39
Responding in consult mode.
Analyzing user request intents.
Explaining component specs.
Describing L293D functionality.
Verifying design and components.
Accessing knowledge base.
Reviewing the bill of materials.
Looking for "Pin function VCC1 logic supply description" in en.CD00000059.pdf
Looking for "Pin function VCC2 supply description" in en.CD00000059.pdf
Looking for "Pin function EN1,2 and EN3,4 description" in en.CD00000059.pdf
Looking for "Pin function 1A 2A 3A 4A input description" in en.CD00000059.pdf
Looking for "Pin function 1Y 2Y 3Y 4Y output description" in en.CD00000059.pdf
Looking for "Internal clamp diodes or flyback diodes presence description" in en.CD00000059.pdf
Looking for "Truth table for inputs A, enable EN, outputs Y for each channel" in en.CD00000059.pdf
Looking for "Recommended decoupling capacitors or supply bypass guidance" in en.CD00000059.pdf
Looking for "Pin function VCC1 logic supply description" in en.CD00000059.pdf
Looking for "Pin function VCC2 supply description" in en.CD00000059.pdf
Looking for "Pin function EN1,2 and EN3,4 description" in en.CD00000059.pdf
Looking for "Pin function 1A 2A 3A 4A input description" in en.CD00000059.pdf
Looking for "Pin function 1Y 2Y 3Y 4Y output description" in en.CD00000059.pdf
Looking for "Internal clamp diodes or flyback diodes presence description" in en.CD00000059.pdf
Looking for "Truth table for inputs A, enable EN, outputs Y for each channel" in en.CD00000059.pdf
Looking for "Recommended decoupling capacitors or supply bypass guidance" in en.CD00000059.pdf
Searching web for: "L293D datasheet pin functions VCC1 VCC2 EN1,2 EN3,4 truth table diode clamp"
Found 1 results.
Querying pin functions and design.
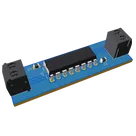
- A dual DC motor driver module built around U1, intended to independently drive two brushed DC motors with separate logic and motor supplies. Typical uses: small robots, rovers, pan/tilt mechanisms, and general two-motor control.
- Driver IC: U1 (L293D) – Dual H-bridge driver. Two channels (1/2) form one H-bridge; channels (3/4) form the second.
- Motor outputs:
- Control inputs:
- Power:
- Reference motor symbol: M3 (generic DC motor) appears illustrative.
- Per the L293D datasheet (TI/ST):
- VCC1 is the logic/inputs supply; VCC2 is the motor/output supply. Drivers are enabled in pairs (EN1,2 for channels 1/2; EN3,4 for 3/4).
- Truth table (per channel): Enable=H, A=H -> Y=H; Enable=H, A=L -> Y=L; Enable=L -> Y=Z (high-Z). Using two channels as an H-bridge, one side driven high and the other low sets motor direction. Swapping the inputs reverses direction.
- Power nets:
- Inputs/enable:
- Motor outputs:
- Motor B is correctly split: M2 P1 -> U1:3Y and P2 -> U1:4Y (separate nets).
- Motor A appears shorted: Net "Net (M1 - P2)" includes M1 P1 and P2 plus U1:1Y and U1:2Y on the same net. That ties both H-bridge outputs together and both motor terminals together, which prevents differential drive and risks the driver. This needs to be split into two distinct nets: one for 1Y->M1:A and another for 2Y->M1:B.
- Two-supply architecture: Separate logic (VCC1) and motor (VCC2) rails is a good practice to isolate noisy load currents from logic.
- Internal clamp diodes: L293D includes output clamp (flyback) diodes for inductive loads. This simplifies the BOM, though diode current/thermal limits still apply.
- Decoupling:
- Place a small-value decoupler at each supply pin and a nearby bulk cap. Knowledge-base guidance: position the smallest value directly at the IC power pin and the larger capacitor nearby (e.g., 0.1uF at the pin and 10uF adjacent). Ensure capacitors operate at no more than 60% of their maximum rated voltage.
- Technology trade-off: L293D uses a bipolar transistor output stage. Versus modern MOSFET H-bridges, this typically incurs higher conduction loss and more heat for the same load. It’s robust and simple, but less efficient.
- Incorrect net for Motor A: The shorted outputs/net must be corrected before layout or testing.
- Missing external connectivity: Logic/motor supply terminals and control/enable terminals need to be tied to the same nets as the IC pins and portals.
- Supply integrity:
- Motor current creates large transients. Without adequate bulk capacitance and tight decoupling at VCC2, you can see resets/noise on logic. Keep loop areas small; return high di/dt currents directly to the GND node near U1.
- Thermal headroom: H-bridge loss manifests as heat in U1; ensure operating current and ambient allow safe junction temperature, and provide copper for heat spreading.
- Inductive kickback: While the L293D includes internal diodes, validate they meet worst-case energy for your motors; consider external suppression (TVS on VCC2, RC snubbers, or ferrite) if needed.
- Grounding: Use a solid ground reference and avoid sharing high-current motor returns with sensitive logic return paths to reduce ground bounce.
- Differential drive robots (two wheels), conveyor belts, small positioners, and any system needing two DC motors with direction control and optional speed control (via PWM on INx or ENx).
- Electrical fixes:
- Power robustness:
- Add clearly specified bulk capacitance on VCC2 near U1 and the motor terminals; follow the placement guidance above and capacitor derating rule (operate at no more than 60% of rated voltage).
- Consider a TVS diode on the VCC2 input and reverse-polarity protection on the motor supply terminal.
- Control interface:
- Layout guidance (next stage):
- Keep C1 (logic) and C2 (motor) as close to U1 pins as possible (0.1uF at the pin, bulk adjacent); route high-current paths short and wide; maintain a continuous ground reference; separate motor return from logic return where possible before they meet at a solid plane.
- Scalability and alternatives:






Welcome 👋
Flux helps you build PCBs faster with an AI teammate!
Create your account to collaborate, stay updated, fork your own version, and get instant answers from our AI agent.
carlosrocka
copilot