MPU-6050 Project Breakdown
Thought for 1 min 32 sec
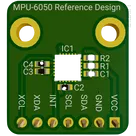
MPU-6050 Reference Design: Detailed Breakdown
1. Purpose & Applications
2. Core Components & Netlist
3. Functional Blocks & Interactions 3.1 Power & Decoupling
4. Design Choices & Trade-offs
5. Layout & Performance Considerations
6. Real-World Challenges
7. Areas for Improvement & Future Enhancements
This project is a breakout/reference design for the InvenSense MPU-6050 6-axis IMU, providing a ready-to-use I²C interface, power decoupling, and header pins for easy integration into host systems.
1. Purpose & Applications
- Enable rapid evaluation and integration of the MPU-6050 (3-axis accel + 3-axis gyro) into embedded designs
- Typical use cases: drones, robotics, motion tracking, stabilization, gesture recognition
- Offers both primary I²C bus (SDA/SCL) and auxiliary I²C bus (XDA/XCL) for external magnetometer or sensors
2. Core Components & Netlist
Table
| Designator | Part | Function |
|---|---|---|
| IC1 | MPU-6050 | 6-axis motion sensor with on-chip regulator |
| C2 | Decoupling cap on VDD | ± capacitive filtering on analog supply |
| C4 | Decoupling cap on VLOGIC | Stabilizes digital I/O rail |
| C3 | Cap on REGOUT | Required by MPU-6050 internal regulator |
| C1 | Cap on CPOUT | Bypass cap for internal charge pump output |
| R1 | I²C pull-up (SCL) | 4.7 kΩ typical pull-up to 3.3 V |
| R2 | I²C pull-up (SDA) | 4.7 kΩ typical pull-up to 3.3 V |
| J1 | 1×07 2.54 mm header | Breakout: VDD, GND, SDA, SCL, INT, XDA, XCL |
3. Functional Blocks & Interactions 3.1 Power & Decoupling
- 3.3 V In → nets
3V3/3.3Vfeed both VDD and VLOGIC pins on [IC1] - C2 on VDD and C4 on VLOGIC placed as close as possible to the pins
- Internal LDO: MPU-6050’s on-chip regulator requires C3 (REGOUT→GND) and C1 (CPOUT→GND) per datasheet
- Primary bus: SDA and SCL lines pulled up to 3.3 V by R2 and R1
- Net routing:
- SDA net → [IC1:SDA] → [R2] → [J1:Pin 3]
- SCL net → [IC1:SCL] → [R1] → [J1:Pin 4]
- Supports up to 400 kHz (or higher “Fast-mode Plus”) if layout and pull-ups are optimized
- Aux bus: XDA/XCL pins broken out to [J1:Pin 7]/[J1:Pin 5] for connecting an external magnetometer or other slave
- INT (interrupt) pin on [IC1] → [J1:Pin 5] for host to detect data-ready or motion events
4. Design Choices & Trade-offs
- Internal vs. external regulator
- Pros: fewer external parts, smaller BOM
- Cons: limited filtering control—must follow datasheet CPOUT/REGOUT requirements
- Pull-up resistor value (~4.7 kΩ) balances rise-time vs. I²C drive strength
- 0603 passives for compactness vs. ease of soldering
- 2.54 mm header → universal compatibility vs. larger board footprint
5. Layout & Performance Considerations
- Place decoupling caps within 2 mm of the chip’s VDD/VLOGIC pins
- Separation of analog (accelerometer/gyro) ground from digital ground if noise becomes an issue—consider split-plane or star ground
- I²C bus routing: keep SDA/SCL traces parallel, avoid stubs, limit trace length to minimize ringing
- Optional filtering: ferrite beads or series resistors (22 Ω–33 Ω) on I/O lines for EMI suppression
6. Real-World Challenges
- Thermal drift affecting sensor accuracy—consider temperature compensation
- Mechanical vibration → use proper mounting, conformal coating if needed
- Power-supply noise → add Pi filters or LDO upstream if host rail is noisy
7. Areas for Improvement & Future Enhancements
- On-board magnetometer (e.g., AK8963) → full 9-axis IMU
- Level-shifting circuitry for 5 V hosts
- SPI interface footprint for applications requiring higher-speed data transfer
- EMI/ESD protection: TVS diodes on I/O pins for robust field deployment
- Miniaturization: switch to 0201 passives, castellated edges, or castellated dome for module integration
In summary, this reference design adheres to the MPU-6050 datasheet recommendations, providing all necessary decoupling, pull-ups, and breakout access. Proper layout and component selection ensure stable operation up to Fast-mode I²C, enabling seamless integration into motion-sensing applications.
Add magnetometer
Add ESD protection
Decoupling placement
SPI interface footprint