Top User Projects
Explore innovation and practical design in Flux.ai's top user projects. This collection highlights outstanding printed circuit board (PCB) projects crafted by our community members. Featuring a range of complexities and applications, these projects showcase the real-world potential and diversity of PCB design. The top user projects section is an invaluable resource for inspiration and learning. Whether you’re a veteran PCB designer seeking fresh ideas or a newcomer aiming to understand various design strategies, these projects offer a wealth of knowledge and insight into the dynamic world of PCB design. By highlighting the achievements of our community, the top user projects stand as a testament to the innovative spirit and collaborative nature of Flux.ai’s users, fostering a culture of knowledge sharing and continuous advancement in the field of electronics design.

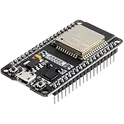
Nodemcu-12E ESP8266
NodeMCU V3 ESP8266 ESP-12E is WiFi development board that helps you to prototype your IoT product with few Lua script lines, or through Arduino IDE. The board is based on ESP8266 ESP-12E variant, unlike other ESP-12E, you won’t need to buy a separate breakout board, usb to serial adapter, or even solder it to a PCB to get started, you will only need a usb cable (Micro USB).
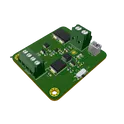
4.9k Uses35 StarsUSB Security Token
This design implements a USB security token powered by an STM32 microcontroller. The device is engineered for compactness and efficient PCB integration while ensuring robust security features. Key elements of the design include: - **Microcontroller Core:** A STM32F103T8U6 serves as the primary processing unit, handling USB communication and security protocols. - **USB Interface:** A USB-A plug provides connectivity to the host. Dedicated net portals ensure proper routing of the VBUS, D+, D–, and ground signals. - **Power Regulation:** A low-dropout regulator supplies a stable 3.3V operating voltage, ensuring low noise and proper current supply to the microcontroller and peripherals. - **Signal Conditioning and EMI Filtering:** An EMI filter is used to maintain signal integrity and reduce interference while preserving the security token’s functionality. - **Synchronous Elements:** A ceramic resonator is incorporated to provide a precise clock source for USB data transfer and microcontroller operations. - **Additional Components:** Surface-mount resistors, capacitors, and LED indicators are deployed to ensure proper conditioning, decoupling, and status feedback. Their compact 0402 packages facilitate a highly integrated design. - **Connectivity and Net Portals:** Custom net portals are used throughout the schematic to streamline connectivity and PCB layout, keeping the design modular and easy to modify. This USB security token is designed with industry-standard components and robust connectivity to ensure secure, reliable operation in portable security applications. #USBToken #STM32 #PCBDesign #SecurityTechnology #PortableSecurity #Microcontrollers #USBInterface #PowerRegulation #EMIProtection #CompactDesign
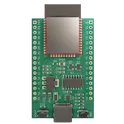
0 Uses30 StarsESP32-WROOM-32D
ESP32-WROOM-32D 24 VAC Industrial Control Board with Protected PSU, Interlocked Relays, 0–10 V Output, Ethernet/Wi‑Fi, and I²C Expansion ESP32-WROOM-32D and ESP32-WROOM-32U are powerful, generic Wi-Fi + Bluetooth® + Bluetooth LE MCU modules that target a wide variety of applications, ranging from low-power sensor networks to the most demanding tasks, such as voice encoding, music streaming and MP3 decoding. ESP32-WROOM-DA - EOL
111.6k Uses29 Stars
Ground (Alt Style)
This ground symbol behaves identically to the most popular ground symbol https://www.flux.ai/jharwinbarrozo/ground due to the "Part Type" property being set to "Ground." This means changing the designator has no effect on electrical connectivity. If you are trying to use a ground symbol for separate grounds (e.g. analog ground), please use this part https://www.flux.ai/nico/ground-portal or fork the part and change the "Part Type" property to "Portal". The corresponding docs page can be found [here](https://docs.flux.ai/tutorials/working-with-ground--basics--multiple-grounds--and-ground-fill-m)
21.2k Uses25 Stars
ArduinoMicro-MidiFreak
Arduino Micro - MIDI Controller It uses the Arduino Micro as USB midi controller. It has 1 capacitive touch octave (12 Keys), 2 rotary encoders, a button, and a proximity sensor that can be used as a mod wheel, sustain pedal or MPE. The oled screen displays the different configuration options. It can be set to any channel or C.C. so it can be used to modify other instruments behavior. The capacitive touch keys can also be used as 12 drum machine pads.
0 Uses22 StarsBRAVE POWER MANAGEMENT BOARD
Brave is a versatile and efficient power board that can provide 12v, 5v and 3.3v outputs for various applications. It can be powered by battery or solar panel, and the battery can be recharged by solar energy. It can also be powered by a USB port if needed. This board is ideal for IoT projects that require reliable and stable power supply in different environments. #internetOfThings #IoT #power #management #usb
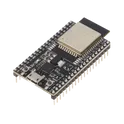
0 Uses21 StarsESP32-WROOM-32E Reference Design
This project is a reference design for an ESP32-WROOM-32E based device. It features USB-C for power and data transfer, onboard voltage regulation, and multiple peripheral connections. It also includes a CH340C for USB to serial conversion #referenceDesign #project #ESP32 #ESP32WROOM #RF #WIFI #MCU #simpleEmbedded #espressif #template .
0 Uses20 Stars






![[2-layer] JLCPCB Constraints](https://img-cdn.flux.ai/eyJidWNrZXQiOiJncmF2aXRvbi1lbGVjdHJpYy1zeW1ib2xzIiwia2V5IjoiZG9jdW1lbnRfYXNzZXRzLzItbGF5ZXItdGh1bWItYzk4NzE0NGEtNTg0Ni00MzEyLTlkNDktNjBlZmM2N2FiMDk3LnBuZyIsImVkaXRzIjp7InJlc2l6ZSI6eyJ3aWR0aCI6MTI0LCJoZWlnaHQiOjEyNCwiZml0IjoiY29udGFpbiIsImJhY2tncm91bmQiOnsiciI6MCwiZyI6MCwiYiI6MCwiYWxwaGEiOjB9fX0sIm91dHB1dEZvcm1hdCI6IndlYnAifQ==)